Мероприятия:Робофест-2012
Материал из Кафедра Автоматики и телемеханики
18 февраля 2012 года был проведен первый региональный Робототехнический Фестиваль "Робофест-2012".[1][2][3]
В рамках Фестиваля состоялась выставка-презентация роботов и прошли соревнования по робототехнике, команда-победитель которых будет представлять Пермский край на федеральных соревнованиях по робототехнике. Фестиваль проходил в рамках реализации Программы «Робототехника» в Пермском крае при поддержке Министерства культуры, молодежной политики и массовых коммуникаций Пермского края и Фонда «Вольное дело». Организаторы Фестиваля – группа компаний «Grata Group». Представителем от Пермского Национального Исследовательского Политехнического Университета была команда "WatchDog", под руководством тренера Гончаровского Олега Владленовича. В команду вошли студенты 4 курса специальности 220201.65 "Управление и информатика в технических системах":
- Беляев Александр,
- Русиешвили Константин,
- Лоскутов Андрей,
- Набиюллин Артем.
Представляемый проект имел название "Два в одном".


Описание представленного проекта
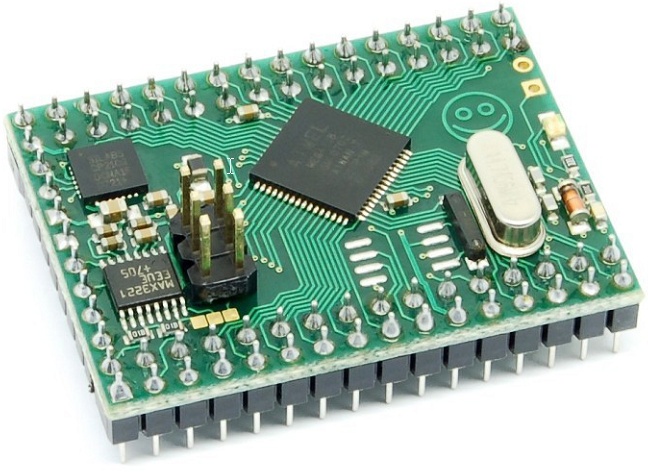
Изначальный вариант, представлял собой платформу с дифференциальным приводом Mouse "Bare Bones" Kit фирмы Robodyssey Systems,

оснащенную ОЕМ-модулем Crumb128 фирмы chip45 на основе микроконтроллера Atmel ATmega128.
Также использовались:
- Bluetooth-адаптер OR-BT20-115.2;
- смартфон Samsung GT-I8000, датчики которого применялись для ориентации робота.
Робот разработан как распределенная встроенная система. В нашем случае это означает, что часть функций (координация) выполняет персональный компьютер.
Система управления робота относится к типу "интерактивная автоматизированная".
Для разработки прикладного программного обеспечения (ПО) рабочего места оператора и программного обеспечения смартфона на Windows Mobile использовались:
- открытая интегрированная среда разработки (IDE) Pelles С for Windows (для ПО рабочего места оператора);
- Samsung Windows Mobile SDK (для ПО смартфона на Windows Mobile);
- открытое программное средство проектирования WinAVR (для программирования для микроконтроллера ATmega128).
Сценарии функционирования робота

Робот "Мотылек" (MT-робот)
МТ-робот использует датчик освещенности смартфона. Смартфон устанавливается на подвижную платформу лицевой панелью кверху. Затем МТ-робот помещается под источником света. Робот должен находиться в постоянном движении и при этом не покидать светового пятна от источника. Изменение освещенности фиксируется датчиком смартфона и передается через беспроводной интерфейс в устройство обработки информации. Устройство обработки принимает решение о направлении и времени движения.
МТ-робот может быть участником той части вечеринки, когда все танцуют. Его поведение ко всеобщему удовольствию будет напоминать «танец мотылька вокруг свечи».
Робот «Исследователь лабиринтов» (ME-робот)
МЕ-робот использует датчик близости смартфона и передний концевой выключатель. Смартфон устанавливается на длинный торец слева сбоку подвижной платформы лицевой панелью наружу. Он должен найти ближайшую стену и двигаться вдоль нее, как бы она не меняла своего направления. Датчик близости фиксирует удаление или приближение к стене слева. Положение МЕ-робота относительно стены передается через беспроводной интерфейс в устройство обработки информации. Устройство обработки принимает решение о направлении и времени движения.
МЕ-робот перемещаясь вдоль стен офиса, помогает его сотрудникам доставлять друг другу мелкие пакеты «не путаясь под ногами».
Вторая платформа
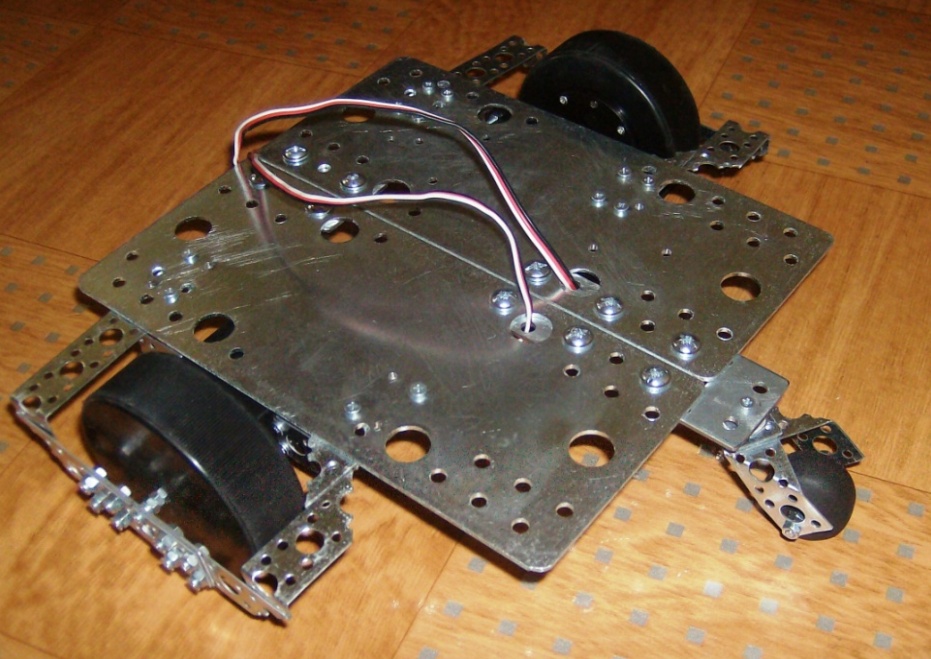
Буквально за неделю до выступления, появилась вторая платформа с дифференциальным приводом, выполненная в полностью металлическом исполнении.
Было принято решение внести некоторое изменение в программу выступления, а именно добавить ещё одного робота, который не имея датчиков движения, повторял все движения, первой платформы-робота. В качестве электроники для второго робота было решено использовать такой же пакет, что и применялся на первом.
Тема выступления была объявлена организаторами «Робот – друг человека». Но роботы ведь почти как люди, и чувства им не чужды. Поэтому проект был представлен как небольшой рассказ о дружбе двух роботов.
Итоги выступления
Результатом работы явилось награждение дипломом в номинации «Real Robo-project» в соревнованиях "Творческое направление" и "Сбор реального робота".



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
.jpg){kind=link}
{kind=link}
Примечания
Фотографии и текст предоставил: А.Р. Набиюллин