Аудитории:315:Учебная — различия между версиями
Материал из Кафедра Автоматики и телемеханики
Mvk (обсуждение | вклад) |
Mvk (обсуждение | вклад) |
||
| (не показано 66 промежуточных версии 3 участников) | |||
| Строка 1: | Строка 1: | ||
| − | {{ | + | {{Аудитория |
| + | |Заголовок=Лаборатория "Системы автоматизации и управления", ауд. 315 к.А, ЭТФ | ||
| + | |Файл тотема=BangBang.jpg | ||
| + | |Описание тотема=Мистер Bang-Bang Fuzzy | ||
| + | |Ширина изображения тотема=120px | ||
| + | |Описание=В настоящее время мы наблюдаем широкое распространение '''''систем автоматизации и управления''''' практически во всех сферах человеческой деятельности: от компактных бортовых систем управления транспортными средствами и до крупномасштабных распределенных систем автоматизации больших промышленных предприятий. | ||
| − | + | Поэтому так важна качественная подготовка специалистов по эксплуатации и проектированию подобных систем. | |
| − | + | ||
| − | + | Также большое значение для инновационной деятельности имеют научные исследования в областях, связанных с построением сложных систем автоматизации и систем автоматического управления. | |
| − | + | Эти два вида работ (учебная и научно-исследовательская), находясь во взаимодействии, реализуются на базе данной лаборатории. | |
| − | + | |Ответственные=* Кавалеров, Максим Владимирович | |
| − | + | * Хижняков, Юрий Николаевич | |
| − | + | |Фото=315_Ряд_у_окна.jpg | |
| − | | | + | |Фотогалерея=Файл:315_Ряд_у_окна.jpg{{!}}Учебные стенды "Модель вентиляционной системы", "Робот-сортировщик" |
| − | | | + | Файл:315_Средний_ряд.jpg{{!}}Учебные стенды систем управления температурой, расходом и давлением |
| − | + | Файл:315_Ряд_у_двери.jpg{{!}}Рабочие места для имитационного моделирования систем управления | |
| − | + | Файл:315_Компьютер_преподавателя.jpg{{!}}Рабочее место преподавателя | |
| − | + | |Ширина изображения фотогалереи=180 | |
| − | + | |Высота изображения фотогалереи=240 | |
| − | | | + | |Оснащение=В лаборатории располагаются 12 компьютеров для студентов и 1 компьютер для |
| − | = | + | |
| − | В лаборатории располагаются 12 компьютеров для студентов и 1 компьютер для | + | |
преподавателя. | преподавателя. | ||
| − | + | [[Файл:italc-screenshot.png|мини|200px|Пример окна iTALC на компьютере преподавателя]] | |
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | [[Файл:italc-screenshot. | + | |
С помощью программного обеспечения | С помощью программного обеспечения | ||
[http://italc.sourceforge.net iTALC] | [http://italc.sourceforge.net iTALC] | ||
| Строка 36: | Строка 31: | ||
# ''Режим удаленного управления''. Преподаватель может перехватывать управление компьютером студента. В этом режиме удобно вносить коррективы в действия студентов и помогать им в решении тех или иных практических задач, которые могут возникать в ходе выполнения учебных заданий.{{-}} | # ''Режим удаленного управления''. Преподаватель может перехватывать управление компьютером студента. В этом режиме удобно вносить коррективы в действия студентов и помогать им в решении тех или иных практических задач, которые могут возникать в ходе выполнения учебных заданий.{{-}} | ||
| − | === Лабораторные стенды | + | === Лабораторные и исследовательские стенды === |
| − | + | {{Галерея|180px|249px| | |
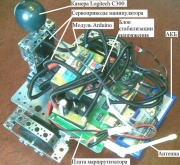
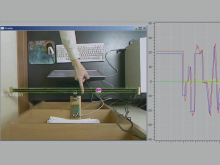
| − | {{{ | + | Файл:Перевернутый_маятник_с_нечетким_регулятором.png{{#}}[[Проекты:Перевернутый_маятник|'''"Перевернутый маятник"''']]{{#}}Проекты:Перевернутый_маятник |
| − | {{ | + | Файл:Робот-сортировщик_общий_вид.jpg{{#}}[[Лабораторный стенд:Робот-сортировщик|'''"Робот-сортировщик"''']]{{#}}Лабораторный стенд:Робот-сортировщик |
| − | {{ | + | Файл:Модель вентиляционной системы.jpg{{#}}[[Лабораторный стенд:Модель вентиляционной системы|'''"Модель вентиляционной системы"''']]{{#}}Лабораторный стенд:Модель вентиляционной системы |
| − | + | Файл:Модель технологической линии.jpg{{#}}[[Лабораторный стенд:Модель технологической линии|'''"Модель технологической линии"''']]{{#}}Лабораторный стенд:Модель технологической линии | |
| − | + | Файл:Модель картофелехранилища 2.jpg{{#}}[[Лабораторный стенд:Модель картофелехранилища|'''"Модель картофелехранилища"''']]{{#}}Лабораторный стенд:Модель картофелехранилища | |
| − | + | Файл:Модель связанных резервуаров.jpg{{#}}[[Лабораторный стенд:Модель связанных резервуаров|'''"Модель связанных резервуаров"''']]{{#}}Лабораторный стенд:Модель связанных резервуаров | |
| − | + | }} | |
| − | + | == Проекты, выполненные в рамках исследований, проводимых в лаборатории == | |
| − | {{ | + | {{Галерея:Название-Фото|[[Категория:Проекты]]|250px|165px}} |
| − | + | |Учебные курсы=* Локальные системы управления | |
| − | + | * Современные проблемы теории управления | |
| − | {{ | + | * Алгоритмы нечеткого, нейронного и нейро-нечеткого управления в системах реального времени |
| − | {{ | + | * Нечеткое управление в системах автоматизации |
| − | {{ | + | * Компьютерные технологии управления в технических системах |
| − | {{ | + | * Разработка пользовательского интерфейса в управляющих системах реального времени |
| − | {{ | + | * Системное программное обеспечение управляющих систем реального времени |
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | |Учебные курсы= | + | |
| − | * Локальные системы управления | + | |
| − | * | + | |
* Программирование и основы алгоритмизации | * Программирование и основы алгоритмизации | ||
| − | * | + | * Планирование задач в управляющих системах реального времени |
| − | + | ||
| − | + | ||
* Проектирование систем реального времени | * Проектирование систем реального времени | ||
| − | + | |Исследования=* Нечеткое и нейронное управление | |
| − | |Исследования= | + | |
| − | * Нечеткое и нейронное управление | + | |
* Автоматизация автономных электростанций | * Автоматизация автономных электростанций | ||
* Планирование задач в системах реального времени | * Планирование задач в системах реального времени | ||
| − | * Программное обеспечение систем автоматизации и управления | + | * Программное обеспечение систем автоматизации и управления |
| − | + | |Название раздела примечаний= | |
| − | | | + | |
| − | + | ||
}} | }} | ||
Текущая версия на 15:34, 11 сентября 2014
Лаборатория "Системы автоматизации и управления", ауд. 315 к.А, ЭТФ

В настоящее время мы наблюдаем широкое распространение систем автоматизации и управления практически во всех сферах человеческой деятельности: от компактных бортовых систем управления транспортными средствами и до крупномасштабных распределенных систем автоматизации больших промышленных предприятий.
Поэтому так важна качественная подготовка специалистов по эксплуатации и проектированию подобных систем.
Также большое значение для инновационной деятельности имеют научные исследования в областях, связанных с построением сложных систем автоматизации и систем автоматического управления.
Эти два вида работ (учебная и научно-исследовательская), находясь во взаимодействии, реализуются на базе данной лаборатории.
Ответственные за лабораторию:
Фотогалерея лаборатории

Учебные стенды "Модель вентиляционной системы", "Робот-сортировщик"

Учебные стенды систем управления температурой, расходом и давлением

Рабочие места для имитационного моделирования систем управления

Рабочее место преподавателя




Оснащение
В лаборатории располагаются 12 компьютеров для студентов и 1 компьютер для преподавателя.

С помощью программного обеспечения iTALC реализуется эффективное взаимодействие между компьютером преподавателя и компьютерами студентов в следующих основных режимах.
- Режим проектора. Преподаватель может транслировать изображение со своего монитора на мониторы студентов. Этот режим удобен для объяснения учебного материала и демонстрации примеров работы в программных средах.
- Режим наблюдения. Преподаватель видит изображения на мониторах студентов.
- Режим удаленного управления. Преподаватель может перехватывать управление компьютером студента. В этом режиме удобно вносить коррективы в действия студентов и помогать им в решении тех или иных практических задач, которые могут возникать в ходе выполнения учебных заданий.
Лабораторные и исследовательские стенды
|






Проекты, выполненные в рамках исследований, проводимых в лаборатории
|

В лаборатории проводятся занятия по следующим учебным дисциплинам:
- Локальные системы управления
- Современные проблемы теории управления
- Алгоритмы нечеткого, нейронного и нейро-нечеткого управления в системах реального времени
- Нечеткое управление в системах автоматизации
- Компьютерные технологии управления в технических системах
- Разработка пользовательского интерфейса в управляющих системах реального времени
- Системное программное обеспечение управляющих систем реального времени
- Программирование и основы алгоритмизации
- Планирование задач в управляющих системах реального времени
- Проектирование систем реального времени
На базе лаборатории проводятся исследования по следующим направлениям:
- Нечеткое и нейронное управление
- Автоматизация автономных электростанций
- Планирование задач в системах реального времени
- Программное обеспечение систем автоматизации и управления
|
|
|
|