Проекты:Шарик на балансире с инфракрасными дальномерами — различия между версиями
Материал из Кафедра Автоматики и телемеханики
Mvk (обсуждение | вклад) |
Mvk (обсуждение | вклад) |
||
| Строка 2: | Строка 2: | ||
|Место размещения={{Лаборатории:Оформление|Системы автоматизации и управления|315|Учебная|нет}} | |Место размещения={{Лаборатории:Оформление|Системы автоматизации и управления|315|Учебная|нет}} | ||
| Описание= | | Описание= | ||
| − | {{YouTube|id=T4uCPQe3X4I|Ширина=480px|Высота=387px|Выравнивание="right"|Левый отступ=3|Правый отступ=0}} | + | {{Видео|Тип=YouTube|id=T4uCPQe3X4I|Ширина=480px|Высота=387px|Выравнивание="right"|Левый отступ=3|Правый отступ=0}} |
'''Шарик на балансире''' (англ. ''Ball and Beam'') <ref>[http://www.control-systems-principles.co.uk/whitepapers/ball-and-beam1.pdf Peter Wellstead. Ball and Beam 1: Basics]</ref> - это один из типовых объектов управления, который довольно часто используется в качества экспериментального объекта для исследования различных законов управления, а также при решении проблем планирования задач реального времени <span style="white-space: nowrap;">(см. например <ref>[http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.58.2276&rep=rep1&type=pdf M. Velasco, J. Fuertes, P. Marti, The self triggered task model for real-time control systems. Work-in-Progress Session of the 24th IEEE Real-Time Systems Symposium (RTSS03)]</ref> <ref>[http://www.cs.uiuc.edu/class/sp08/cs598tar/Papers/ControlServer.pdf A. Cervin, J. Eker, Control-scheduling codesign of real-time systems: The control server approach. Journal of Embedded Computing, Vol. 1, 2005, 209-224]</ref>).</span> | '''Шарик на балансире''' (англ. ''Ball and Beam'') <ref>[http://www.control-systems-principles.co.uk/whitepapers/ball-and-beam1.pdf Peter Wellstead. Ball and Beam 1: Basics]</ref> - это один из типовых объектов управления, который довольно часто используется в качества экспериментального объекта для исследования различных законов управления, а также при решении проблем планирования задач реального времени <span style="white-space: nowrap;">(см. например <ref>[http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.58.2276&rep=rep1&type=pdf M. Velasco, J. Fuertes, P. Marti, The self triggered task model for real-time control systems. Work-in-Progress Session of the 24th IEEE Real-Time Systems Symposium (RTSS03)]</ref> <ref>[http://www.cs.uiuc.edu/class/sp08/cs598tar/Papers/ControlServer.pdf A. Cervin, J. Eker, Control-scheduling codesign of real-time systems: The control server approach. Journal of Embedded Computing, Vol. 1, 2005, 209-224]</ref>).</span> | ||
Версия 16:53, 19 октября 2011
Место размещения: Системы автоматизации и управления (ауд.315, к.А ЭТФ)
Шарик на балансире (англ. Ball and Beam) [1] - это один из типовых объектов управления, который довольно часто используется в качества экспериментального объекта для исследования различных законов управления, а также при решении проблем планирования задач реального времени (см. например [2] [3]).
Существует большое количество всевозможных реализаций объекта "Шарик на балансире".
Данный лабораторный стенд отличает простота конструкции за счет использования сервопривода Hitec HS-485HB и двух инфракрасных дальномеров Sharp GP2D12.
Для локального управления используется контроллер Carduino Nano V.4, относящийся к семейству открытых контроллеров Arduino.
Графический интерфейс с пользователем реализуется на основе бесплатного и кроссплатформенного фреймворка Qt. Отображение графиков выполнено с использованием библиотеки qwt.
Данный лабораторный стенд позволяет проводить исследования и учебные занятия по следующим темам:
- системы автоматического управления;
- планирование задач реального времени;
- разработка программного обеспечения для систем реального времени;
- программирование микроконтроллеров семейства Arduino;
- разработка и модификация графического интерфейса с пользователем систем управления.
В настоящее время "Шарик на балансире" используется в ходе исследовательских работ по темам, связанным с системами автоматического управления и системами реального времени.
Также с данным стендом работают студенты в ходе лабораторных занятий по учебной дисциплине "Технические средства автоматизации и управления".
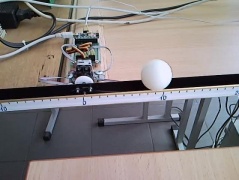
Шарик на балансире
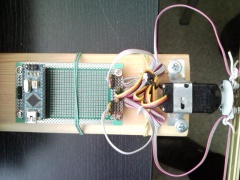
Контроллер и сервопривод

Инфракрасный дальномер



Примечания
- ↑ Peter Wellstead. Ball and Beam 1: Basics
- ↑ M. Velasco, J. Fuertes, P. Marti, The self triggered task model for real-time control systems. Work-in-Progress Session of the 24th IEEE Real-Time Systems Symposium (RTSS03)
- ↑ A. Cervin, J. Eker, Control-scheduling codesign of real-time systems: The control server approach. Journal of Embedded Computing, Vol. 1, 2005, 209-224