Проекты:Шарик на балансире с компьютерным зрением — различия между версиями
Материал из Кафедра Автоматики и телемеханики
Mvk (обсуждение | вклад) |
Mvk (обсуждение | вклад) |
||
| Строка 15: | Строка 15: | ||
Графический интерфейс с пользователем реализуется на основе бесплатного и кроссплатформенного [http://ru.wikipedia.org/wiki/Qt фреймворка Qt]. Отображение графиков выполнено с использованием [http://qwt.sourceforge.net библиотеки qwt]. | Графический интерфейс с пользователем реализуется на основе бесплатного и кроссплатформенного [http://ru.wikipedia.org/wiki/Qt фреймворка Qt]. Отображение графиков выполнено с использованием [http://qwt.sourceforge.net библиотеки qwt]. | ||
| − | В приведенном здесь видеоролике изложены особенности функционирования и конструкции текущей версии шарика на балансире с компьютерным зрением. | + | В приведенном здесь видеоролике изложены особенности функционирования и конструкции текущей версии шарика на балансире с компьютерным зрением. Это видео лучше смотреть в полноэкранном режиме и формате HD. |
| + | |||
| + | Данная версия шарика на балансире реализована на базе [[Проекты:Шарик на балансире с инфракрасными дальномерами|предыдущей версии]], в которой положение шарика определялось с помощью инфракрасных дальномеров. | ||
| + | |||
| + | Работы по проекту выполняет [[Преподаватели:Кавалеров, Максим Владимирович|М.В. Кавалеров]] в рамках исследований на стыке [http://ru.wikipedia.org/wiki/%D0%9A%D0%BE%D0%BC%D0%BF%D1%8C%D1%8E%D1%82%D0%B5%D1%80%D0%BD%D0%BE%D0%B5_%D0%B7%D1%80%D0%B5%D0%BD%D0%B8%D0%B5 компьютерного зрения] и [[НИР:Планирование_задач_в_системах_реального_времени|планирования задач реального времени]]. | ||
| + | |||
| + | <gallery perrow=3 widths="240px" heights="180px"> | ||
| + | Файл:Шарик на балансире.jpg|Шарик на балансире | ||
| + | Файл:Шарик на балансире_2.jpg|Контроллер и сервомашинка | ||
| + | </gallery> | ||
{{-}} | {{-}} | ||
Версия 00:50, 26 апреля 2012
Проект "Шарик на балансире с компьютерным зрением"
Шарик на балансире (англ. Ball and Beam) [1] - это один из типовых объектов управления, который довольно часто используется в качества экспериментального объекта для исследования различных законов управления, а также при решении проблем планирования задач реального времени (см. например [2] [3]).
Существует большое количество всевозможных реализаций объекта "Шарик на балансире".
Для данного проекта применяется конструкция, в которой балансир перемещает сервомашинка Hitec HS-485HB, которая, в свою очередь, управляется через контроллер Carduino Nano V.4, относящийся к семейству открытых контроллеров Arduino.
Для получения видеоинформации используется веб-камера Logitech C300.
Алгоритмы компьютерного зрения реализуются с помощью свободно распространяемой библиотеки компьютерного зрения OpenCV[4]
Графический интерфейс с пользователем реализуется на основе бесплатного и кроссплатформенного фреймворка Qt. Отображение графиков выполнено с использованием библиотеки qwt.
В приведенном здесь видеоролике изложены особенности функционирования и конструкции текущей версии шарика на балансире с компьютерным зрением. Это видео лучше смотреть в полноэкранном режиме и формате HD.
Данная версия шарика на балансире реализована на базе предыдущей версии, в которой положение шарика определялось с помощью инфракрасных дальномеров.
Работы по проекту выполняет М.В. Кавалеров в рамках исследований на стыке компьютерного зрения и планирования задач реального времени.
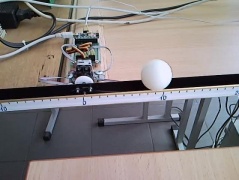
Шарик на балансире
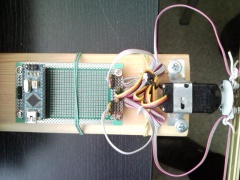
Контроллер и сервомашинка


Примечания
- ↑ Peter Wellstead. Ball and Beam 1: Basics
- ↑ M. Velasco, J. Fuertes, P. Marti, The self triggered task model for real-time control systems. Work-in-Progress Session of the 24th IEEE Real-Time Systems Symposium (RTSS03)
- ↑ A. Cervin, J. Eker, Control-scheduling codesign of real-time systems: The control server approach. Journal of Embedded Computing, Vol. 1, 2005, 209-224
- ↑ Bradski G., Kaehler A. Learning OpenCV. – O’Reilly Media, 2008.