Проекты:Гусеничный робот:v0.2
Материал из Кафедра Автоматики и телемеханики
Версия от 02:07, 4 июня 2012; Mvk (обсуждение | вклад)

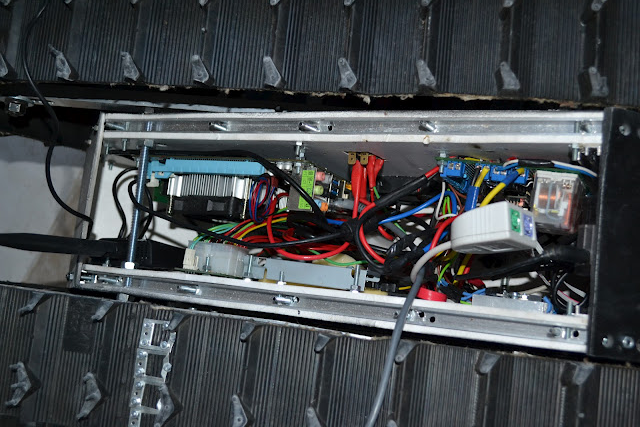
Гусеничный робот v0.2

Гусеничный робот v0.2 (центральная часть, вид сверху)

Пульт управления
Turnigy 9X 9Ch
Изменения в версии 0.2 от 08.04.2012 по сравнению с предыдущей версией (changelog)
- Мощность двигательной части увеличена примерно в 2 раза.
- Сделан новый драйвер двигателей под новую мощность.
- Двигатель переведен на заднюю шестерню, которая теперь стала ведущей.
- Сделан новый каркас, более крепкий и жесткий.
- Сделано более качественное соединение полотна гусеницы с помощью специальных креплений.
- Установлен более мощный адаптер Wi-Fi.
- Удаленное управление реализовано на основе Turnigy 9X 9Ch (см. рисунок).
- Дополнительные небольшие изменения компоновки.
Испытания
Проведено испытание передвижения на ровной поверхности и при преодолении препятствий в виде:
- наклонной плоскости в 45 градусов;
- модели лестницы из трех ступеней.
Также проведено испытание передвижения в сложных условиях мокрого снега.
Основные моменты испытаний можно наблюдать на видео, представленных в данном разделе.
Более полные варианты видео испытаний можно посмотреть на канале пользователя ieremeev.


|
|
|
Mozilla Cavendish Theme based on Cavendish style by Gabriel Wicke modified by DaSch for the Web Community Wiki github Projectpage – Report Bug – Skin-Version: 2.3.4 |