НИР:Планирование задач в системах реального времени — различия между версиями
Материал из Кафедра Автоматики и телемеханики
Mvk (обсуждение | вклад) |
Mvk (обсуждение | вклад) |
||
| Строка 4: | Строка 4: | ||
С общих позиций, '''проблема планирования''' задач реального времени состоит в обеспечении такого выполнения этих задач, которое гарантирует соблюдение всех [[НИР:Ограничения реального времени|ограничений реального времени]] этих задач. | С общих позиций, '''проблема планирования''' задач реального времени состоит в обеспечении такого выполнения этих задач, которое гарантирует соблюдение всех [[НИР:Ограничения реального времени|ограничений реального времени]] этих задач. | ||
| − | В | + | В монографии <ref>Kopetz H. Real-Time Systems: Design Principles for Distributed Embedded Applications. - Springer, 2011. - 376 p.</ref> приводится следующее определение проблемы планирования. |
{{Определение| | {{Определение| | ||
Система [[НИР:Жесткое реальное время|жесткого реального времени]] должна выполнять множество задач реального времени, соперничающих за ресурсы, так, чтобы все критичные (с точки зрения времени) задачи укладывались в отведенные им крайние сроки. Для выполнения каждой задачи требуются вычислительные ресурсы, ресурсы данных и прочие ресурсы, например, устройства ввода-вывода. Тогда '''проблема планирования''' - это проблема такого распределения указанных ресурсов, которое обеспечивает соблюдение всех требований реального времени. | Система [[НИР:Жесткое реальное время|жесткого реального времени]] должна выполнять множество задач реального времени, соперничающих за ресурсы, так, чтобы все критичные (с точки зрения времени) задачи укладывались в отведенные им крайние сроки. Для выполнения каждой задачи требуются вычислительные ресурсы, ресурсы данных и прочие ресурсы, например, устройства ввода-вывода. Тогда '''проблема планирования''' - это проблема такого распределения указанных ресурсов, которое обеспечивает соблюдение всех требований реального времени. | ||
}} | }} | ||
| − | Немного более детализированное определение используется в | + | Немного более детализированное определение используется в монографии <ref>Buttazzo G. Hard Real-Time Computing Systems. – Springer, 2011. – 521 p.</ref>. С небольшой переформулировкой и уточнением его можно воспроизвести здесь следующим образом. |
{{Определение| | {{Определение| | ||
Имеется множество из <math>~n</math> задач <math>~\Gamma=\{\tau_1,\tau_2,...,\tau_n\}</math>, множество из <math>~m</math> процессоров <math>~P=\{P_1,P_2,...,P_m\}</math>, а также множество из <math>~q</math> видов [[НИР:разделяемые ресурсы|разделяемых ресурсов]] <math>~R=\{R_1,R_2,...,R_q\}</math>. | Имеется множество из <math>~n</math> задач <math>~\Gamma=\{\tau_1,\tau_2,...,\tau_n\}</math>, множество из <math>~m</math> процессоров <math>~P=\{P_1,P_2,...,P_m\}</math>, а также множество из <math>~q</math> видов [[НИР:разделяемые ресурсы|разделяемых ресурсов]] <math>~R=\{R_1,R_2,...,R_q\}</math>. | ||
Версия 02:45, 16 января 2012
В системах автоматизации и управления, к которым, в частности, относятся системы автоматизации и управления (САиУ), часто надо осуществлять планирование задач реального времени, что предполагает разделение процессорного времени между этими задачами при условии соблюдения ограничений реального времени.
Определение проблемы планирования задач в системах реального времени
С общих позиций, проблема планирования задач реального времени состоит в обеспечении такого выполнения этих задач, которое гарантирует соблюдение всех ограничений реального времени этих задач.
В монографии [1] приводится следующее определение проблемы планирования.
Система жесткого реального времени должна выполнять множество задач реального времени, соперничающих за ресурсы, так, чтобы все критичные (с точки зрения времени) задачи укладывались в отведенные им крайние сроки. Для выполнения каждой задачи требуются вычислительные ресурсы, ресурсы данных и прочие ресурсы, например, устройства ввода-вывода. Тогда проблема планирования - это проблема такого распределения указанных ресурсов, которое обеспечивает соблюдение всех требований реального времени. |
Немного более детализированное определение используется в монографии [2]. С небольшой переформулировкой и уточнением его можно воспроизвести здесь следующим образом.
Имеется множество из Ограничения предшествования между задачами могут быть заданы в виде направленного ациклического графа. С каждой задачей могут связаны ограничения реального времени. Тогда проблема планирования - это проблема обеспечения такого назначения (за счет распределения по временной шкале) процессоров из |
 , множество из
, множество из  процессоров
процессоров  , а также множество из
, а также множество из  видов
видов  .
.
 и ресурсов из
и ресурсов из  всем задачам из
всем задачам из  , которое обеспечивает завершение (или выполнение) всех задач согласно заданным ограничениям.
, которое обеспечивает завершение (или выполнение) всех задач согласно заданным ограничениям.
Указанные определения являются довольно общими. В более конкретных условиях формулировка проблемы планирования становится более детализированной и более удобной для решения. Поясним это на следующем простом примере.
Пример проблемы планирования задач реального времени
Пусть на однопроцессорном контроллере в составе САиУ выполняются две задачи реального времени, обозначаемые  , для двух независимых контуров управления (см. рис. 1).
, для двух независимых контуров управления (см. рис. 1).
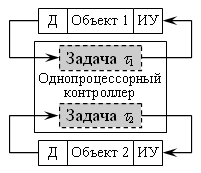
(Д - датчик; ИУ - исполнительное устройство).
Каждая  -я задача должна периодически формировать запросы (
-я задача должна периодически формировать запросы ( ), и запросу требуется время выполнения (здесь для простоты оно считается постоянным) для формирования очередного воздействия на объект (см. рис. 2). В случае отдельного процессора для каждой задачи проблем не возникает, и они выполняются, как показано на рис. 2.
), и запросу требуется время выполнения (здесь для простоты оно считается постоянным) для формирования очередного воздействия на объект (см. рис. 2). В случае отдельного процессора для каждой задачи проблем не возникает, и они выполняются, как показано на рис. 2.
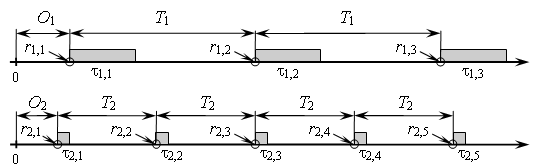 в случае отдельных процессоров.
в случае отдельных процессоров.Однако при общем процессоре возникает взаимовлияние.
Пусть для разделения процессорного времени между задачами применяется концепция планирования с фиксированными приоритетами (ПФП).
Пусть начальные смещения ( ) и периоды (
) и периоды ( ) менять нельзя, тогда в рамках ПФП остается лишь менять приоритеты (
) менять нельзя, тогда в рамках ПФП остается лишь менять приоритеты ( ).
).
Поэтому существуют только два варианта планирования: ( выше
выше  ), ( ниже ), приводящие к двум вариантам выполнения задач (см. рис. 3).
), ( ниже ), приводящие к двум вариантам выполнения задач (см. рис. 3).
 в случае общего процессора.
в случае общего процессора.Согласно ПФП запрос задачи с более высоким приоритетом прерывает выполнение запроса задачи с более низким приоритетом. На рисунке окружностью отмечается момент ( ) появления запроса
) появления запроса  в очереди запросов, а прерывание запроса обозначается линией над соответствующей временной осью.
в очереди запросов, а прерывание запроса обозначается линией над соответствующей временной осью.
При этом 1-й вариант на рис. 3 приводит к значительному нарушению строгой периодичности для  : видно, что
: видно, что  , где
, где  - начало выполнения .
- начало выполнения .
Простое изменение приоритетов приводит ко 2-му варианту на рис. 3, который обеспечивает строгую периодичность для , и небольшое нарушение периодичности для  .
.
Пусть известно, что такое небольшое нарушение для оказывается допустимым. Тогда решением проблемы планирования будет 2-й вариант на рис. 3 с соответствующими значениями  ,
,  .
.
Однако в приведенном простом примере имеется всего два варианта планирования, и проблема планирования сводится к выбору одного из этих двух вариантов.
В общем случае проблема планирования совокупности периодических задач жесткого реального времени в случае концепции ПФП сводится к выбору такой совокупности  , которая обеспечивает соблюдение ограничений реального времени для всех
, которая обеспечивает соблюдение ограничений реального времени для всех  задач.
задач.
Возможность изменения  в заданных диапазонах, а также наличие
в заданных диапазонах, а также наличие  вариантов назначения приоритетов для задач приводят к тому, что полный перебор вариантов становится практически нереализуемым. Нетрудно показать, что указанная проблема планирования является NP-трудной [3].
вариантов назначения приоритетов для задач приводят к тому, что полный перебор вариантов становится практически нереализуемым. Нетрудно показать, что указанная проблема планирования является NP-трудной [3].
Поэтому естественный подход к ее решению – это разработка эффективных эвристических алгоритмов, которые за приемлемое время с высокой вероятностью находят значения , обеспечивающие подходящий вариант планирования.
В данном очень простом примере была рассмотрена проблема планирования для концепции ПФП. Но существуют другие концепции планирования задач реального времени, и для каждой из них характерны свои специфические особенности проблемы планирования.
Примечания