НИР:Планирование задач в системах реального времени — различия между версиями
Материал из Кафедра Автоматики и телемеханики
Mvk (обсуждение | вклад) |
Mvk (обсуждение | вклад) |
||
| Строка 1: | Строка 1: | ||
| − | В системах автоматизации и управления (САиУ) для отдельного вычислительного устройства | + | В системах автоматизации и управления (САиУ) для отдельного вычислительного устройства часто надо осуществлять [[НИР:Планирование задач реального времени|планирование задач реального времени]], что предполагает разделение процессорного времени между этими задачами при условии соблюдения [[НИР:Ограничения реального времени|ограничений реального времени]]. |
== Проблема планирования задач реального времени == | == Проблема планирования задач реального времени == | ||
| Строка 5: | Строка 5: | ||
Поясним проблему планирования задач реального времени на следующем примере. | Поясним проблему планирования задач реального времени на следующем примере. | ||
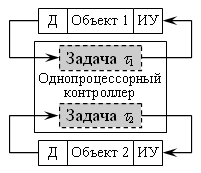
| − | Пусть на однопроцессорном контроллере в составе САиУ выполняются две задачи | + | Пусть на однопроцессорном контроллере в составе САиУ выполняются две задачи реального времени, обозначаемые <math>\tau_1,\,\tau_2</math>, для двух независимых контуров управления (см. рис. 1). |
[[Файл:Две задачи, выполняемые на контроллере.png|frame|слева|Рис. 1. Две задачи, выполняемые на контроллере<br /> (Д - датчик; ИУ - исполнительное устройство).]] | [[Файл:Две задачи, выполняемые на контроллере.png|frame|слева|Рис. 1. Две задачи, выполняемые на контроллере<br /> (Д - датчик; ИУ - исполнительное устройство).]] | ||
| Строка 12: | Строка 12: | ||
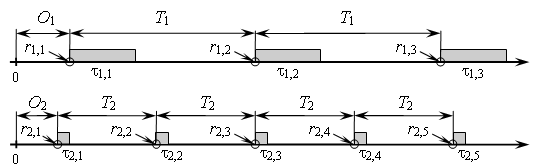
[[Файл:Пример выполнения задач в случае отдельных процессоров.png|frame|слева|Рис. 2. Пример выполнения задач <math>\tau_1,\,\tau_2</math> в случае отдельных процессоров.]] | [[Файл:Пример выполнения задач в случае отдельных процессоров.png|frame|слева|Рис. 2. Пример выполнения задач <math>\tau_1,\,\tau_2</math> в случае отдельных процессоров.]] | ||
| − | Однако при общем процессоре возникает взаимовлияние. Предполагается, что для разделения процессорного времени между задачами применяется концепция планирования с фиксированными приоритетами (ПФП) | + | Однако при общем процессоре возникает взаимовлияние. Предполагается, что для разделения процессорного времени между задачами применяется [[НИР:Планирование с фиксированными приоритетами|концепция планирования с фиксированными приоритетами (ПФП)]]. |
{{-}} | {{-}} | ||
== Примечания == | == Примечания == | ||
{{Примечания}} | {{Примечания}} | ||
Версия 00:55, 26 декабря 2011
В системах автоматизации и управления (САиУ) для отдельного вычислительного устройства часто надо осуществлять планирование задач реального времени, что предполагает разделение процессорного времени между этими задачами при условии соблюдения ограничений реального времени.
Проблема планирования задач реального времени
Поясним проблему планирования задач реального времени на следующем примере.
Пусть на однопроцессорном контроллере в составе САиУ выполняются две задачи реального времени, обозначаемые  , для двух независимых контуров управления (см. рис. 1).
, для двух независимых контуров управления (см. рис. 1).
(Д - датчик; ИУ - исполнительное устройство).
Каждая  -я задача должна периодически формировать запросы (
-я задача должна периодически формировать запросы ( ), и запросу требуется время выполнения (здесь для простоты оно считается постоянным) для формирования очередного воздействия на объект (см. рис. 2). В случае отдельного процессора для каждой задачи проблем не возникает, и они выполняются, как показано на рис. 2.
), и запросу требуется время выполнения (здесь для простоты оно считается постоянным) для формирования очередного воздействия на объект (см. рис. 2). В случае отдельного процессора для каждой задачи проблем не возникает, и они выполняются, как показано на рис. 2.
 в случае отдельных процессоров.
в случае отдельных процессоров.Однако при общем процессоре возникает взаимовлияние. Предполагается, что для разделения процессорного времени между задачами применяется концепция планирования с фиксированными приоритетами (ПФП).