НИР:Планирование задач в системах реального времени — различия между версиями
Материал из Кафедра Автоматики и телемеханики
Mvk (обсуждение | вклад) |
Mvk (обсуждение | вклад) |
||
| Строка 1: | Строка 1: | ||
| − | В системах автоматизации и управления (САиУ) для отдельного вычислительного устройства (ВУ) часто надо осуществлять планирование задач реального времени (РВ), что предполагает разделение процессорного времени между этими задачами при условии соблюдения ограничений РВ. | + | В системах автоматизации и управления (САиУ) для отдельного вычислительного устройства (ВУ) часто надо осуществлять планирование задач реального времени (РВ), что предполагает разделение процессорного времени между этими задачами при условии соблюдения ограничений РВ (см. рис. 1). |
Рассмотрим пример. | Рассмотрим пример. | ||
Пусть на однопроцессорном контроллере в составе САиУ выполняются две задачи РВ, обозначаемые <math>\tau_1,\,\tau_2</math>, для двух независимых контуров управления. | Пусть на однопроцессорном контроллере в составе САиУ выполняются две задачи РВ, обозначаемые <math>\tau_1,\,\tau_2</math>, для двух независимых контуров управления. | ||
| − | [[Файл:Две задачи, выполняемые на контроллере.png|слева|Две задачи, выполняемые на контроллере]] | + | [[Файл:Две задачи, выполняемые на контроллере.png|frame|слева|Рис. 1. Две задачи, выполняемые на контроллере<br /> (Д - датчик; ИУ - исполнительное устройство).]] |
Версия 00:40, 26 декабря 2011
В системах автоматизации и управления (САиУ) для отдельного вычислительного устройства (ВУ) часто надо осуществлять планирование задач реального времени (РВ), что предполагает разделение процессорного времени между этими задачами при условии соблюдения ограничений РВ (см. рис. 1).
Рассмотрим пример.
Пусть на однопроцессорном контроллере в составе САиУ выполняются две задачи РВ, обозначаемые  , для двух независимых контуров управления.
, для двух независимых контуров управления.
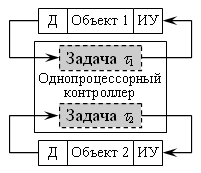
Рис. 1. Две задачи, выполняемые на контроллере
(Д - датчик; ИУ - исполнительное устройство).
(Д - датчик; ИУ - исполнительное устройство).