Лабораторный стенд:Робот-сортировщик — различия между версиями
Материал из Кафедра Автоматики и телемеханики
Mvk (обсуждение | вклад) |
Mvk (обсуждение | вклад) |
||
| Строка 43: | Строка 43: | ||
Задачи, которые ставятся перед контроллером, - это, в основном, задачи, связанные с управлением исполнительными механизмами и взаимодействием с датчиками. Все логические операции по перемещению манипулятора и обработке изображения, осуществляет компьютер, к которому подключается контроллер. | Задачи, которые ставятся перед контроллером, - это, в основном, задачи, связанные с управлением исполнительными механизмами и взаимодействием с датчиками. Все логические операции по перемещению манипулятора и обработке изображения, осуществляет компьютер, к которому подключается контроллер. | ||
| + | {{-}} | ||
| + | |||
| + | === Режим работы === | ||
| + | Робот-сортировщик выполняет поиск и сортировку объектов по тому или иному критерию. Например, это может быть просто поиск объектов определенного цвета, а может быть сортировка объектов по их размерам. | ||
| + | |||
| + | Основной блок в составе цикла функционирования выглядит, в общих чертах, следующим образом. | ||
| + | # С помощью веб-камеры формируется снимок площадки с объектами в виде растрового изображения, которое сохраняется в оперативной памяти. | ||
| + | # На полученном изображении отыскивается очередной объект. | ||
| + | # Определяется принадлежность объекта к той или иной категории объектов согласно заданному признаку (например, цвету, форме или размеру). | ||
| + | # Осуществляется перемещение манипулятора к объекту. После перемещения манипулятор располагается точно над объектом. Перемещение может осуществляться как на основе вычисления необходимого количества шагов для управляющих двигателей, так и на основе корректировки положения манипулятора по видеоизображению. | ||
| + | # Выполняется захват объекта манипулятором путем опускания магнитного захвата и включения электромагнита. | ||
| + | # Происходит перемещение манипулятора, удерживающего объект, к месту выгрузки объекта. Объекты, обладающие различными значениями признака (например, имеющие разные цвета), выгружаются в разные места, специально отведенные для того или иного значения признака. Тем самым, выполняется сортировка объектов по заданному признаку. | ||
| + | |||
}} | }} | ||
Версия 00:14, 16 октября 2011
Лабораторный стенд "Робот-сортировщик"
В настоящее время наблюдается начало широкого внедрения роботов в различных областях не только производственной, но и повседневной деятельности человека. На это указывает множество примеров, начиная от имеющихся в продаже моделей роботов-пылесосов, роботов для мытья окон и заканчивая опытными образцами робота для уборки кухни [1] и человекоподобного робота-слуги, который планируется вывести в продажу для домашнего применения к 2015 году [2].
Учитывая эту тенденцию, в ближайшее десятилетие можно ожидать достаточно быстрое развитие в области робототехники, подогреваемое потребительским спросом. Поэтому уже сейчас при подготовке специалистов в области управления в технических системах важно уделять существенное внимание различным аспектам этих технологий, а также проводить соответствующие научные исследования.
С этой целью на был разработан лабораторный стенд «Робот-сортировщик»[3], который позволяет проводить исследования и учебные занятия по следующим темам:
- разработка программного обеспечения для систем компьютерного зрения;
- использование компьютерного зрения для сортировки объектов на основе различных критериев;
- изучение основ визуального сервоуправления;
- разработка новых методов визуального сервоуправления;
- особенности разработки программного обеспечения робототехнических систем.
Текущая реализация


Робот–сортировщик представляет собой систему в виде манипулятора с магнитным захватом, перемещаемым по вертикальной оси. Сам манипулятор может свободно перемещаться по площади 30 на 40 см с помощью шаговых двигателей, металлических направляющих и ременной передачи. Посредством манипулятора, робот может захватывать металлические объекты и перемещать их в целевые области, сортируя их по внешним признакам. Распознавание этих признаков осуществляется с помощью видеокамеры, расположенной над полем сортировки.
Интеллектуальная составляющая робота распределяется между микроконтроллером и управляющим компьютером, при этом основная ее часть возлагается на управляющий компьютер, к которому, в частности, подключается видеокамера. Для получения картинки на стенде используется веб-камера, подключаемая к компьютеру по USB.

В качестве устройств, отвечающих за передвижения манипулятора, было решено использовать шаговые двигатели из-за удобства позиционирования с помощью них. В нашем случае, чтобы уменьшить затраты на изготовление стенда, использовались 4 шаговых двигателя EM-142 и EM-141 от старых принтеров Epson LX1050.

Для того чтобы робот-сортировщик мог переносить детали с одного места на другое, нужно было реализовать вертикальное перемещение манипулятора. В качестве вертикально движущейся части был выбран автомобильный активатор дверей Saturn MS-2. При разработке манипулятора в качестве захватывающего устройства используется электромагнит. Это представляется наиболее подходящим решением для данного стенда на начальной стадии в силу простоты реализации.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Все схемы управления силовыми механизмами были собраны на одной плате с нужными разъемами и радиатором, формируя блок управления силовыми механизмами.
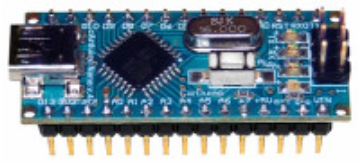
В качестве управляющего контроллера был выбран контроллер семейства Arduino (Carduino Nano v4). Он имеет открытую архитектуру, а также свободно распространяемую среду разработку. Для цифрового ввода/вывода используется 14 контактов, шесть из которых могут быть использованы для вывода сигналов ШИМ. Также имеется шесть аналоговых входов при наличии АЦП на 10 разрядов.
Задачи, которые ставятся перед контроллером, - это, в основном, задачи, связанные с управлением исполнительными механизмами и взаимодействием с датчиками. Все логические операции по перемещению манипулятора и обработке изображения, осуществляет компьютер, к которому подключается контроллер.
Режим работы
Робот-сортировщик выполняет поиск и сортировку объектов по тому или иному критерию. Например, это может быть просто поиск объектов определенного цвета, а может быть сортировка объектов по их размерам.
Основной блок в составе цикла функционирования выглядит, в общих чертах, следующим образом.
- С помощью веб-камеры формируется снимок площадки с объектами в виде растрового изображения, которое сохраняется в оперативной памяти.
- На полученном изображении отыскивается очередной объект.
- Определяется принадлежность объекта к той или иной категории объектов согласно заданному признаку (например, цвету, форме или размеру).
- Осуществляется перемещение манипулятора к объекту. После перемещения манипулятор располагается точно над объектом. Перемещение может осуществляться как на основе вычисления необходимого количества шагов для управляющих двигателей, так и на основе корректировки положения манипулятора по видеоизображению.
- Выполняется захват объекта манипулятором путем опускания магнитного захвата и включения электромагнита.
- Происходит перемещение манипулятора, удерживающего объект, к месту выгрузки объекта. Объекты, обладающие различными значениями признака (например, имеющие разные цвета), выгружаются в разные места, специально отведенные для того или иного значения признака. Тем самым, выполняется сортировка объектов по заданному признаку.
- ↑ Уборщик ReadyBot зачищает кухню от следов трапезы
- ↑ Робот-слуга Romeo на прилавках магазинов до 2015 года
- ↑ Еремеев И.М., Кавалеров М.В. Создание лабораторного стенда "Робот-сортировщик" // Системы мониторинга и управления: сб. науч. тр. / Перм. гос. техн. ун-т. – Пермь, 2011