Проекты:Перевернутый маятник — различия между версиями
Материал из Кафедра Автоматики и телемеханики
Mvk (обсуждение | вклад) |
Mvk (обсуждение | вклад) |
||
| (не показаны 2 промежуточные версии этого же участника) | |||
| Строка 39: | Строка 39: | ||
Под руководством [[Преподаватели:Хижняков, Юрий Николаевич|Ю.В. Хижнякова]] ведутся работы по повышению устойчивости и совершенствованию конструкции перевернутого маятника. | Под руководством [[Преподаватели:Хижняков, Юрий Николаевич|Ю.В. Хижнякова]] ведутся работы по повышению устойчивости и совершенствованию конструкции перевернутого маятника. | ||
| − | [[Категория: | + | [[Категория:Оснащение]] |
__NOEDITSECTION__ __NOTITLE__ __NOTOC__ | __NOEDITSECTION__ __NOTITLE__ __NOTOC__ | ||
Текущая версия на 15:34, 11 сентября 2014
Проект "Перевернутый маятник"
Перевернутый маятник (inverted pendulum) является одним из типовых объектов в рамках теории автоматического управления.
Поставлена задача реализации нечеткого регулятора для стабилизации положения перевернутого маятника.
Изменение угла наклона перевернутого маятника достигается за счет перемещения тележки перевернутого маятника путем формирования управляющего воздействия на двигатель постоянного тока, находящийся в тележке.
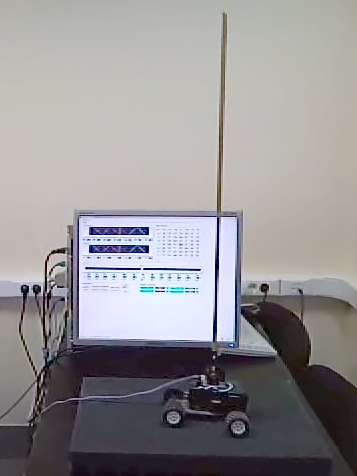
Угол наклона перевернутого маятника считывается на основе реостатного датчика.

{kind=link}
{kind=link}
Нечеткий регулятор реализован в виде программы, выполняемой на персональном компьютере. На рис. 2) представлен графический интерфейс программы, реализующей нечеткий регулятор перевернутого маятника.
Исходя из динамических свойств перевернутого маятника, задаем диапазон изменения ошибки  от –5 градусов до +5 градусов (относительно вертикального положения перевернутого маятника) и диапазон изменения скорости изменения ошибки
от –5 градусов до +5 градусов (относительно вертикального положения перевернутого маятника) и диапазон изменения скорости изменения ошибки  от – 2 градусов в сек. до +2 радусов в сек. Заданное значение угла
от – 2 градусов в сек. до +2 радусов в сек. Заданное значение угла  соответствует вертикальному положению перевернутого маятника.
соответствует вертикальному положению перевернутого маятника.
Управляющее воздействие  является функцией от и , где .
является функцией от и , где .
Тогда в качестве лингвистических переменных нечеткого регулятора выступают: , и .
Для перехода от четкого значения к нечеткой переменной по отклонению перевёрнутого маятника от вертикального положения и угловой скорости принято семь терм:
- положительная большая (ПБ) типа Z;
- положительная средняя (ПС) типа Л;
- положительная малая (ПМ) типа Л;
- норма типа Л;
- отрицательная малая (ОМ) типа Л;
- отрицательная средняя (ОС) типа Л;
- отрицательная большая (ОБ) типа типа S.
Имеется две входные лингвистические переменные и , и база знаний нечеткого регулятора содержит 49 ячеек (см. рис. 2).
Текущее состояние проекта
Под руководством Ю.В. Хижнякова ведутся работы по повышению устойчивости и совершенствованию конструкции перевернутого маятника.