Проекты:Гусеничный робот — различия между версиями
Материал из Кафедра Автоматики и телемеханики
Mvk (обсуждение | вклад) |
Mvk (обсуждение | вклад) |
||
| (не показаны 22 промежуточные версии этого же участника) | |||
| Строка 1: | Строка 1: | ||
= [[Название::Проект "Гусеничный робот"]] = | = [[Название::Проект "Гусеничный робот"]] = | ||
| − | {{Содержание:Справа}} | + | {{Содержание:Справа}}{{#set:Страница={{PAGENAME}}}}{{#set:Фото=Гусеничный блок робота v0.2.png}} |
| − | {{#set:Страница={{PAGENAME}}}} | + | == Версия 0.2.1 == |
| − | {{#set:Фото=Гусеничный | + | {{:Проекты:Гусеничный робот:v0.2.1}} |
| − | + | == Версия 0.2 == | |
| − | + | {{:Проекты:Гусеничный робот:v0.2}} | |
| − | + | == Версия 0.1 == | |
| − | + | {{:Проекты:Гусеничный робот:v0.1}} | |
| − | + | ||
| − | + | ||
| − | + | ||
| − | == | + | |
| − | + | ||
| − | {{ | + | |
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | == | + | |
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | == | + | == Состояние проекта == |
| − | Работы по проекту, связанные с разработкой универсальной гусеничной платформы выполняет студент '''И.М. Еремеев''' в рамках соответствующей | + | Работы по проекту, связанные с разработкой универсальной гусеничной платформы, выполняет студент '''И.М. Еремеев''' в рамках соответствующей |
магистерской диссертации (руководитель [[Преподаватели:Кавалеров, Максим Владимирович|М.В. Кавалеров]]). | магистерской диссертации (руководитель [[Преподаватели:Кавалеров, Максим Владимирович|М.В. Кавалеров]]). | ||
| − | + | Многие из [[{{PAGENAME}}#Задачи проекта|задач проекта]] выходят за пределы объема этой | |
магистерской диссертации, однако практическим результатом работы над | магистерской диссертации, однако практическим результатом работы над | ||
диссертацией должна стать гусеничная платформа, являющаяся необходимой основой для | диссертацией должна стать гусеничная платформа, являющаяся необходимой основой для | ||
| Строка 68: | Строка 20: | ||
узких дверных проемов. | узких дверных проемов. | ||
| − | == | + | == Публикации по проекту == |
| + | # Еремеев И.М., Кавалеров М.В. Начальный этап разработки многоцелевого гусеничного робота [Электронный ресурс] // III Международная интернет-конференция молодых ученых, аспирантов и студентов «Инновационные технологии: теория, инструменты, практика. InnoTech 2011». URL: http://www.conference.msa.pstu.ru/arhiv/skachat-sbornik-innotech-2011/at_download/file (дата обращения: 06.11.2012). | ||
| + | # Еремеев И.М., Кавалеров М.В. Разработка мобильного робота повышенной проходимости с удаленным управлением // Материалы краевой научно-технической конференции «Автоматизированные системы управления и информационные технологии – 2012». – Пермь, 2012 (в печати). | ||
| − | + | == История проекта == | |
| − | + | ||
| − | + | ||
| − | + | === Предварительная проработка === | |
| − | + | ||
| − | = | + | |
При построении робота было проработано множество вариантов. Были рассмотрены | При построении робота было проработано множество вариантов. Были рассмотрены | ||
колесные варианты, но они не были хорошо проходимы по пересеченной местности, а | колесные варианты, но они не были хорошо проходимы по пересеченной местности, а | ||
| Строка 91: | Строка 41: | ||
выборе профиля гусеницы, хорошо взбирается по ступеням типовых лестниц и по | выборе профиля гусеницы, хорошо взбирается по ступеням типовых лестниц и по | ||
достаточно крутым наклонным плоскостям. Также обеспечивается и хорошая | достаточно крутым наклонным плоскостям. Также обеспечивается и хорошая | ||
| − | грузоподъемность | + | грузоподъемность. Ведь разрабатывается именно универсальная платформа, а |
значит, на ней будут, в последующем, располагаться различные манипуляторы, вес | значит, на ней будут, в последующем, располагаться различные манипуляторы, вес | ||
которых может оказаться существенным. | которых может оказаться существенным. | ||
| Строка 105: | Строка 55: | ||
данных конструкций. | данных конструкций. | ||
| − | + | == Общие сведения о проекте == | |
| − | + | === Задачи проекта === | |
| − | + | Проект разработки гусеничного робота для целей исследования и обучения включает | |
| − | + | в себя следующие задачи: | |
| − | + | 1) разработка моноблочной гусеничной платформы, обладающей способностью: | |
| − | + | * перемещаться по ступеням типовых лестниц в зданиях; | |
| − | + | * перемещаться по пересеченной местности; | |
| − | + | * подниматься по наклонной плоскости с углом наклона до 45 градусов; | |
| + | * нести на себе или тянуть за собой полезную нагрузку весом в несколько десятков килограмм (дает возможность установки и использования дополнительного бортового оборудования); | ||
| − | + | 2) разработка программного обеспечения робота и установку дополнительных | |
| − | + | технических средств, которое позволило бы: | |
| − | + | * выполнять удаленное управление роботом, получая данные с сенсоров робота, в том числе,видеоизображение с одной или нескольких бортовых видеокамер; | |
| − | + | * осуществлять автономное перемещение робота в известной местности (заранее известна ее карта) и в неизвестной местности (карта местности строится одновременно с перемещением робота по технологии [http://en.wikipedia.org/wiki/Simultaneous_localization_and_mapping SLAM]), причем особенность перемещения между этажами здания открывает возможности для построения "многоэтажных" карт; | |
| − | + | * взаимодействие групп роботов (в частности, в случае перевозки более маленьких мобильных роботов на себе); | |
| − | + | * взаимодействие с человеком на основе распознавания его жестов и голосовых команд. | |
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | === Исследовательская составляющая === | |
| − | + | Указанные задачи являются достаточно объемными и несут в | |
| − | + | себе значительную исследовательскую составляющую, затрагивающую различные | |
| − | + | проблемные области, в частности: | |
| − | + | * конструирование схем управления двигателями постоянного тока автономного робота; | |
| − | + | * реализация каналов беспроводной связи между роботом и человеком-оператором, в том числе, для передачи качественного видеоизображения; | |
| − | + | * проектирование архитектуры программного обеспечения автномного робота и разработка необходимых программных компонентов; | |
| − | + | * [[НИР:Планирование задач в системах реального времени| планирование задач реального времени]] в составе программного обеспечения автономного робота; | |
| − | [[ | + | * разработка алгоритмов компьютерного зрения для автономного робота; |
| + | * и др. | ||
| − | + | В качестве примера сложной задачи, для выполнения которой может понадобиться | |
| − | + | решения ряда существенных исследовательских проблем, можно рассмотреть следующую задачу: | |
| − | + | выехать с 3-го этажа здания, спуститься на улицу по обычной ступенчатой | |
| − | + | лестнице, объехать вокруг этого здания (в том числе, по участкам пересеченной | |
| − | + | местности) и вернуться обратно на 3-й этаж самостоятельно (без команд оператора | |
| − | + | или при минимальном участии оператора), избегая столкновения с людьми и, | |
| + | возможно, распознавая их жесты. | ||
| + | === Образовательная составляющая === | ||
| + | Одновременно, разрабатываемый гусеничный робот является удобным средством для | ||
| + | использования в процессах обучения студентов в рамках [[:Категория:Специальности|учебных | ||
| + | специальностей и направлений]] кафедры. | ||
| − | + | Таким образом, данный проект служит как целям научных исследований, так и | |
| − | + | образовательным целям. | |
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
== Примечания == | == Примечания == | ||
Текущая версия на 23:14, 5 ноября 2012
Проект "Гусеничный робот"
Содержание |
Версия 0.2.1

Гусеничный робот v0.2.1 (веб-камера и дальномеры)
Изменения в версии 0.2.1 от 01.06.2012 по сравнению с предыдущей версией (changelog)
- по схеме перекрестных лучей установлены два инфракрасных дальномера Sharp GP2D12, которые используются для предотвращения столкновения с препятствиями;
- установлена веб-камера Logitech C300, неплохо зарекомендовавшая себя при реализации компьютерного зрения для системы "Шарик на балансире";
- дополнительные небольшие изменения аппаратных и программных компонентов.
Испытания
Проверено передвижение по ступеням лестницы в здании, а также проезд через узкую дверь (см. видео в данном разделе).
Версия 0.2

Гусеничный робот v0.2

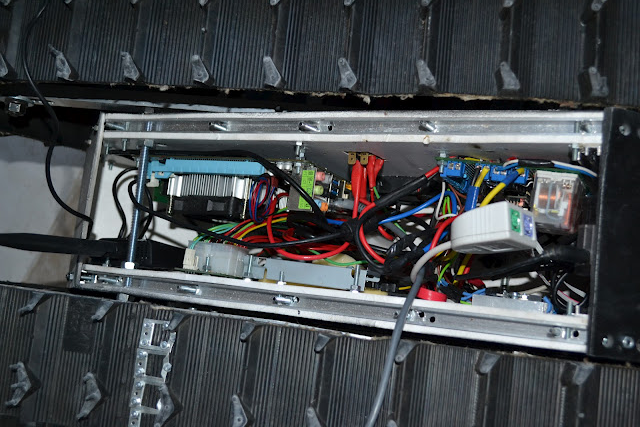
Гусеничный робот v0.2 (центральная часть, вид сверху)

Пульт управления
Turnigy 9X 9Ch
Изменения в версии 0.2 от 08.04.2012 по сравнению с предыдущей версией (changelog)
- Мощность двигательной части увеличена примерно в 2 раза.
- Сделан новый драйвер двигателей под новую мощность.
- Двигатель переведен на заднюю шестерню, которая теперь стала ведущей.
- Сделан новый каркас, более крепкий и жесткий.
- Сделано более качественное соединение полотна гусеницы с помощью специальных креплений.
- Установлен более мощный адаптер Wi-Fi.
- Удаленное управление реализовано на основе Turnigy 9X 9Ch (см. рисунок).
- Дополнительные небольшие изменения компоновки.
Испытания
Проведено испытание передвижения на ровной поверхности и при преодолении препятствий в виде:
- наклонной плоскости в 45 градусов;
- модели лестницы из трех ступеней.
Также проведено испытание передвижения в сложных условиях мокрого снега.
Основные моменты испытаний можно наблюдать на видео, представленных в данном разделе.
Более полные варианты видео испытаний можно посмотреть на канале пользователя ieremeev.
Версия 0.1

Гусеничный робот v0.1

Гусеничный блок робота v0.1 (основные компоненты)

Гусеничный робот v0.1
Конструктивно, платформа разработанного робота представляет из себя "танкообразную" конструкцию размером 550х800х450мм и весом около 35 килограмм. Гусеничный блок изготовлен из алюминиевых профилей, что придает конструкции малый вес и достаточную прочность.
Одним из преимуществ данной конструкции является то, что гусеницы независимы от корпуса и могут быть легко демонтированы, например для транспортировки робота. В каждой гусенице расположено по одному аккумулятору емкостью 12 А/час (возможно расширение до двух) и двигателю с цепной передачей.
По центру, между гусеницами закрепляется корпус с вычислительной и силовой электроникой. Внутри располагаются: материнская плата, жесткий диск, блок питания, универсальный контроллер для управления двигателями, а также драйвер двигателей. Корпус изготовлен из профилей и пластика. Он имеет двойные стенки, которые заменяют вентиляционные каналы. Внутри корпуса на стенках закреплены вентиляторы, которые через вентиляционные отверстия способствуют втягиванию холодного воздуха с одной стороны и выталкиванию горячего с другой. Это реализует циркуляцию воздуха внутри корпуса и не дает перегреваться электронике. Корпус выполнен так, чтобы препятствовать попаданию внутрь влаги и грязи.
В качестве двигателя гусеничного блока используется двигатель от стеклоподъемников автомобилей ВАЗ. Двигатели имеют встроенный редуктор с червячным механизмом и обладают хорошей мощностью. Также они имеют удобное крепление для ведущей шестерни. Двигатели обычно продаются в любом автомагазине, что является большим плюсом. Также следует отметить, что в каждом гусеничном блоке реализована возможность смены передаточного числа, путем перемещения цепи на звездочки с меньшим или большим количеством зубьев.
Среднее время автономной работы робота, составляет примерно 3 часа, при двух установленных аккумуляторах, но может быть увеличено, за счет установки по одному дополнительному аккумулятору в каждую гусеницу. Платформа может перевозить на себе, либо тащить за собой полезную нагрузку весом несколько десятков килограмм (точное значение еще предстоит установить в ходе экспериментов).
Одной из задач при построении робота, была возможность подниматься по лестницам между этажами здания. После продолжительного анализа, моделирования и тестирования был выбран профиль гусеничного полотна и форма самого гусеничного блока. Мощность двигателей позволяет преодолевать наклонные плоскости до 45 градусов наклона и обычные лестничные пролеты.
Важно отметить, что все комплектующие данного гусеничного робота доступны в свободной продаже, в частности, в строительных и автомобильных магазинах. Это упрощает обслуживание и эксплуатацию робота.
Состояние проекта
Работы по проекту, связанные с разработкой универсальной гусеничной платформы, выполняет студент И.М. Еремеев в рамках соответствующей магистерской диссертации (руководитель М.В. Кавалеров).
Многие из задач проекта выходят за пределы объема этой магистерской диссертации, однако практическим результатом работы над диссертацией должна стать гусеничная платформа, являющаяся необходимой основой для дальнейших работ по данному проекту. При этом, кроме обычного удаленного управления человеком, предполагается реализация элементов автономного перемещения робота, в частности, автоматическое позиционирование и преодоление узких дверных проемов.
Публикации по проекту
- Еремеев И.М., Кавалеров М.В. Начальный этап разработки многоцелевого гусеничного робота [Электронный ресурс] // III Международная интернет-конференция молодых ученых, аспирантов и студентов «Инновационные технологии: теория, инструменты, практика. InnoTech 2011». URL: http://www.conference.msa.pstu.ru/arhiv/skachat-sbornik-innotech-2011/at_download/file (дата обращения: 06.11.2012).
- Еремеев И.М., Кавалеров М.В. Разработка мобильного робота повышенной проходимости с удаленным управлением // Материалы краевой научно-технической конференции «Автоматизированные системы управления и информационные технологии – 2012». – Пермь, 2012 (в печати).
История проекта
Предварительная проработка
При построении робота было проработано множество вариантов. Были рассмотрены колесные варианты, но они не были хорошо проходимы по пересеченной местности, а также им трудно давались подъемы по ступеням. Также внимание уделялось гибридным роботам с различными толкателями, роликами и прочими манипуляторами, используемыми для целей подъема по ступеням. Но такие варианты не подходили из-за сложности их реализации, опасений в их надежности и обычно небольшой грузоподъемности.
В итоге, после анализа различных вариантов было решено остановиться на моноблочной гусеничной конструкции. Реализация гусеничного шасси решает почти все поставленные задачи. По проходимости - это самый удачный вариант. Гусеничный робот с легкостью преодолевает пересеченную местность, а также, при правильном выборе профиля гусеницы, хорошо взбирается по ступеням типовых лестниц и по достаточно крутым наклонным плоскостям. Также обеспечивается и хорошая грузоподъемность. Ведь разрабатывается именно универсальная платформа, а значит, на ней будут, в последующем, располагаться различные манипуляторы, вес которых может оказаться существенным.
Среди уже известных гусеничных роботов интересными оказались реализации зарубежных роботостроительных компаний, в частности:
- TALON компании Foster Miller; [1]
- MMP40X компании Machine Lab; [2]
- Element компании Mesa Robotics; [3]
- Scorpion компании Mesa Robotics. [4]
Все они представляют собой моноблочную конструкцию с двумя гусеницами. При разработке нашего робота были учтены определенные преимущества и недостатки данных конструкций.
Общие сведения о проекте
Задачи проекта
Проект разработки гусеничного робота для целей исследования и обучения включает в себя следующие задачи:
1) разработка моноблочной гусеничной платформы, обладающей способностью:
- перемещаться по ступеням типовых лестниц в зданиях;
- перемещаться по пересеченной местности;
- подниматься по наклонной плоскости с углом наклона до 45 градусов;
- нести на себе или тянуть за собой полезную нагрузку весом в несколько десятков килограмм (дает возможность установки и использования дополнительного бортового оборудования);
2) разработка программного обеспечения робота и установку дополнительных технических средств, которое позволило бы:
- выполнять удаленное управление роботом, получая данные с сенсоров робота, в том числе,видеоизображение с одной или нескольких бортовых видеокамер;
- осуществлять автономное перемещение робота в известной местности (заранее известна ее карта) и в неизвестной местности (карта местности строится одновременно с перемещением робота по технологии SLAM), причем особенность перемещения между этажами здания открывает возможности для построения "многоэтажных" карт;
- взаимодействие групп роботов (в частности, в случае перевозки более маленьких мобильных роботов на себе);
- взаимодействие с человеком на основе распознавания его жестов и голосовых команд.
Исследовательская составляющая
Указанные задачи являются достаточно объемными и несут в себе значительную исследовательскую составляющую, затрагивающую различные проблемные области, в частности:
- конструирование схем управления двигателями постоянного тока автономного робота;
- реализация каналов беспроводной связи между роботом и человеком-оператором, в том числе, для передачи качественного видеоизображения;
- проектирование архитектуры программного обеспечения автномного робота и разработка необходимых программных компонентов;
- планирование задач реального времени в составе программного обеспечения автономного робота;
- разработка алгоритмов компьютерного зрения для автономного робота;
- и др.
В качестве примера сложной задачи, для выполнения которой может понадобиться решения ряда существенных исследовательских проблем, можно рассмотреть следующую задачу: выехать с 3-го этажа здания, спуститься на улицу по обычной ступенчатой лестнице, объехать вокруг этого здания (в том числе, по участкам пересеченной местности) и вернуться обратно на 3-й этаж самостоятельно (без команд оператора или при минимальном участии оператора), избегая столкновения с людьми и, возможно, распознавая их жесты.
Образовательная составляющая
Одновременно, разрабатываемый гусеничный робот является удобным средством для использования в процессах обучения студентов в рамках учебных специальностей и направлений кафедры.
Таким образом, данный проект служит как целям научных исследований, так и образовательным целям.
Примечания
- ↑ TALON robots [Электронный ресурс]. URL: http://www.wired.com/images_blogs/dangerroom/files/DS08-126-TalonIVEngineer.pdf
- ↑ MMP-40X Tracked Tactical Robot System [Электронный ресурс]. URL: http://www.themachinelab.com/Tactical/Tactical-40/MMP40X%20Tactical2.pdf
- ↑ Performance Specifications and Features - Element (Modular Robotic Platform) [Электронный ресурс]. URL: http://www.mesa-robotics.com/files/Element%20Performance%20Spec.pdf
- ↑ Scorpion - Developmental Chassis [Электронный ресурс]. URL: http://www.mesa-robotics.com/files/Scorpion%20Spec.pdf
- Последнее изменение этой страницы: 23:14, 5 ноября 2012.
- К этой странице обращались 94 934 раза.
- Политика конфиденциальности
- Описание Кафедра Автоматики и телемеханики
- Отказ от ответственности

 Mozilla Cavendish Theme based on Cavendish style by Gabriel Wicke modified by DaSch for the Web Community Wiki
Mozilla Cavendish Theme based on Cavendish style by Gabriel Wicke modified by DaSch for the Web Community Wiki
github Projectpage – Report Bug – Skin-Version: 2.3.4







{kind=link}